Description
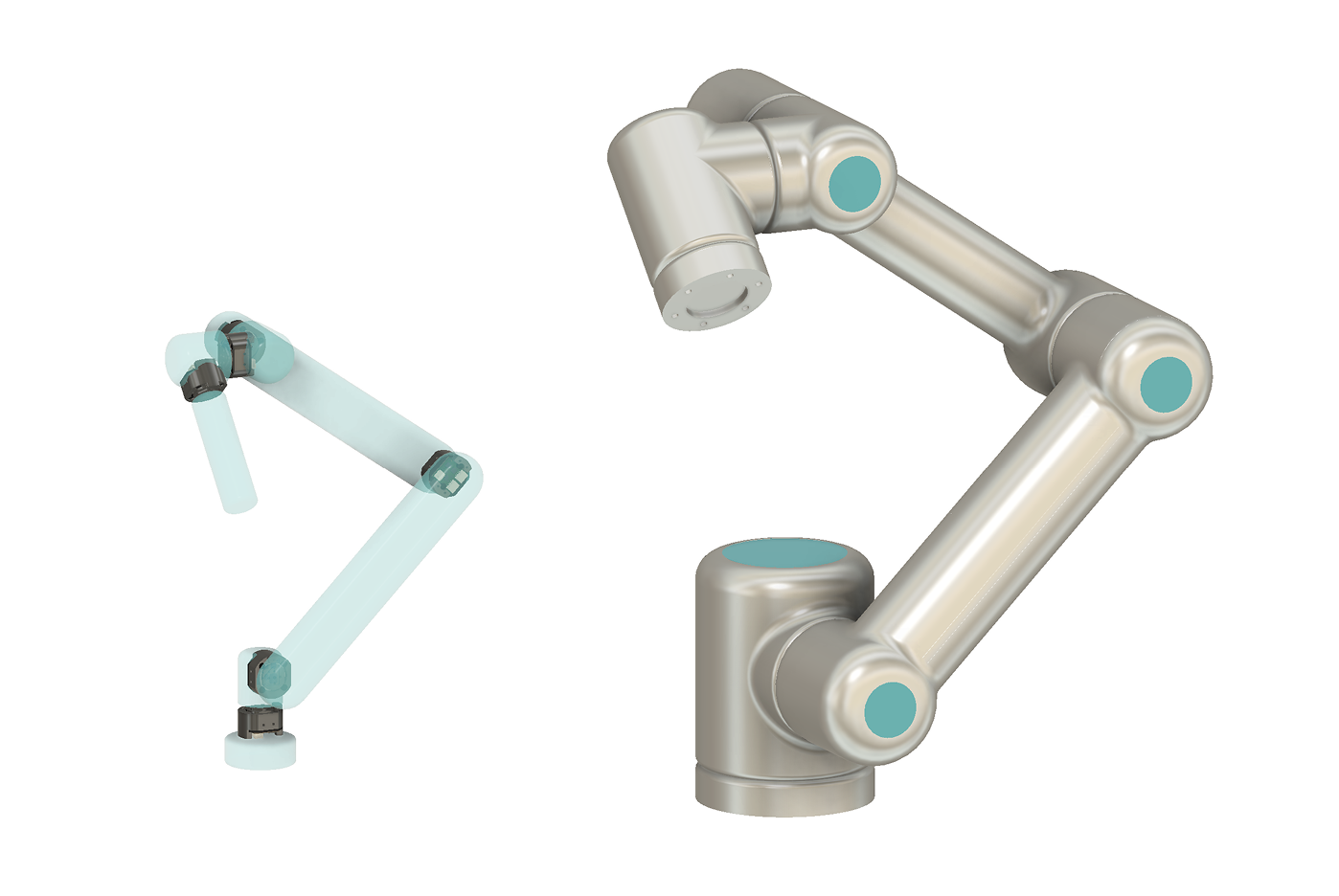
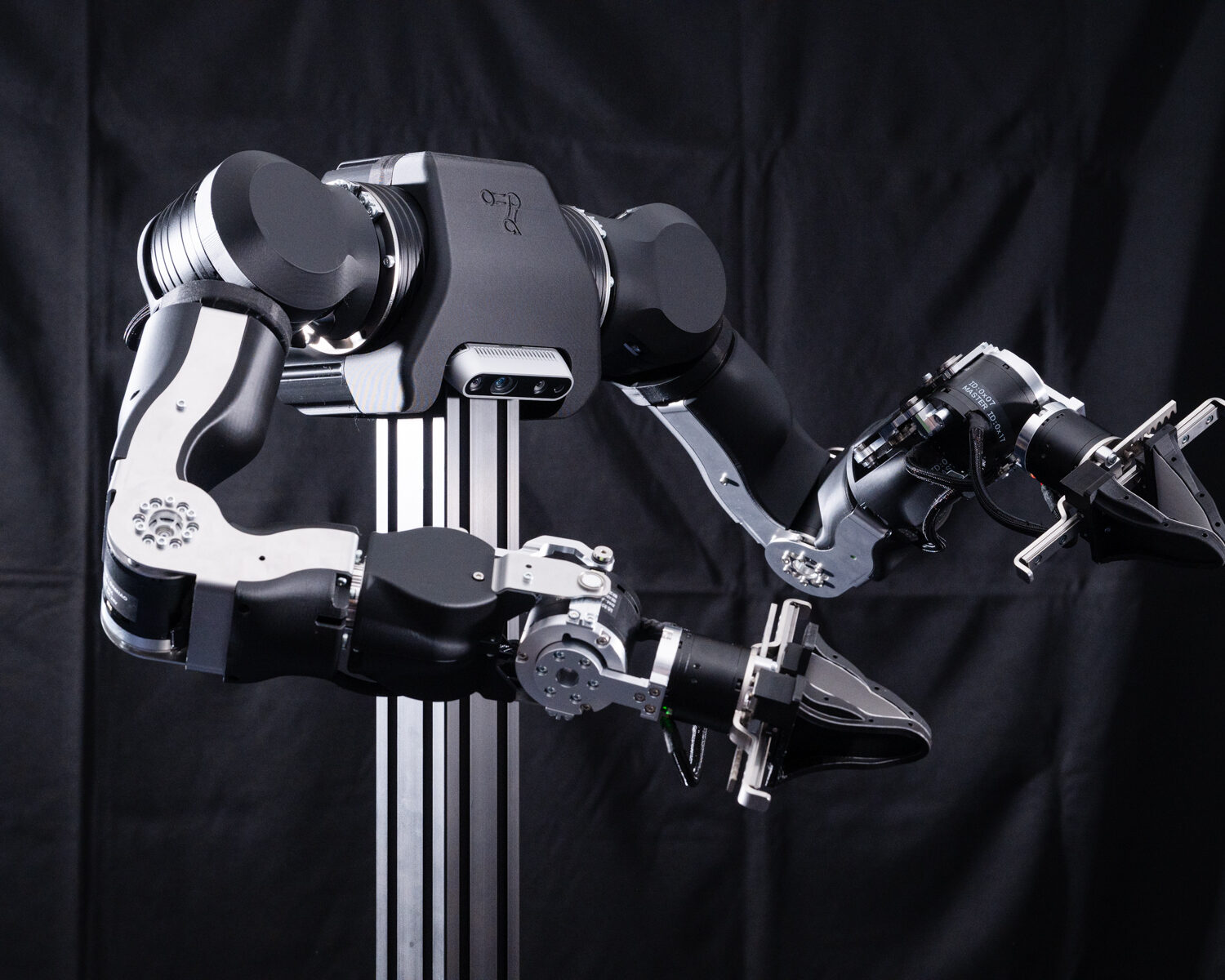
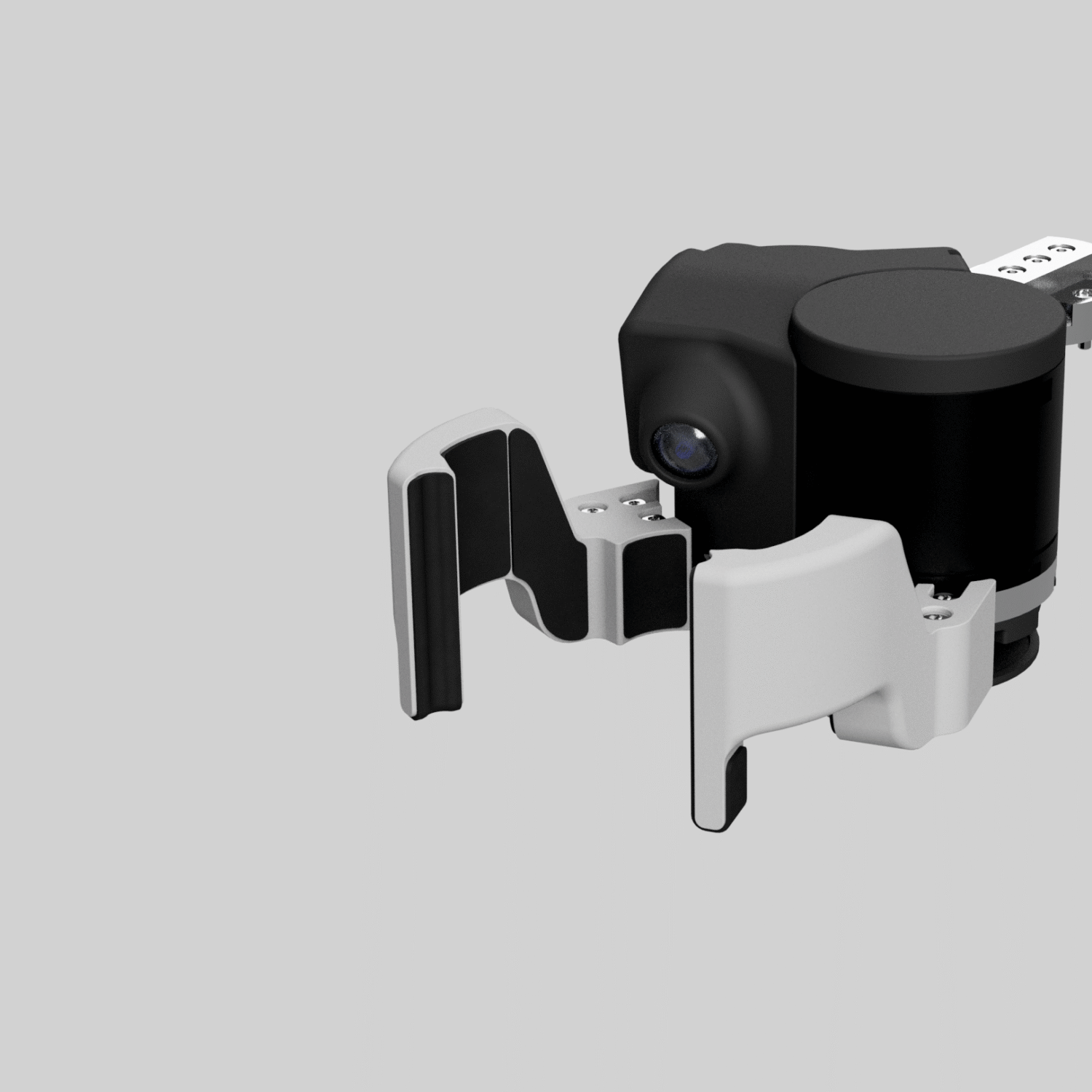
Inspired by the open-source philosophy of OpenArm project and engineered for developers, researchers, educators, and robotics enthusiasts, OpenArm Mini is a compact humanoid robotic arm platform designed for embodied AI development, teleoperation, imitation learning, and advanced robotic interaction experiments.
Built with a modular mechanical structure and developer-friendly software ecosystem, OpenArm Mini delivers a professional robotic research experience in a smaller, more accessible form factor. The platform combines high-performance actuation, precision motion control, and fully open-source hardware/software architecture, enabling users to customize, expand, and integrate the system into a wide range of robotics workflows.