Description
OpenArm 2.0 is the second major release of the project. Beyond a refreshed arm, it expands OpenArm from “an open-source robot arm” into a full stack for reproducible physical-AI research: the arm, a standardized evaluation cell, and a passive teaching device, all designed to work together.
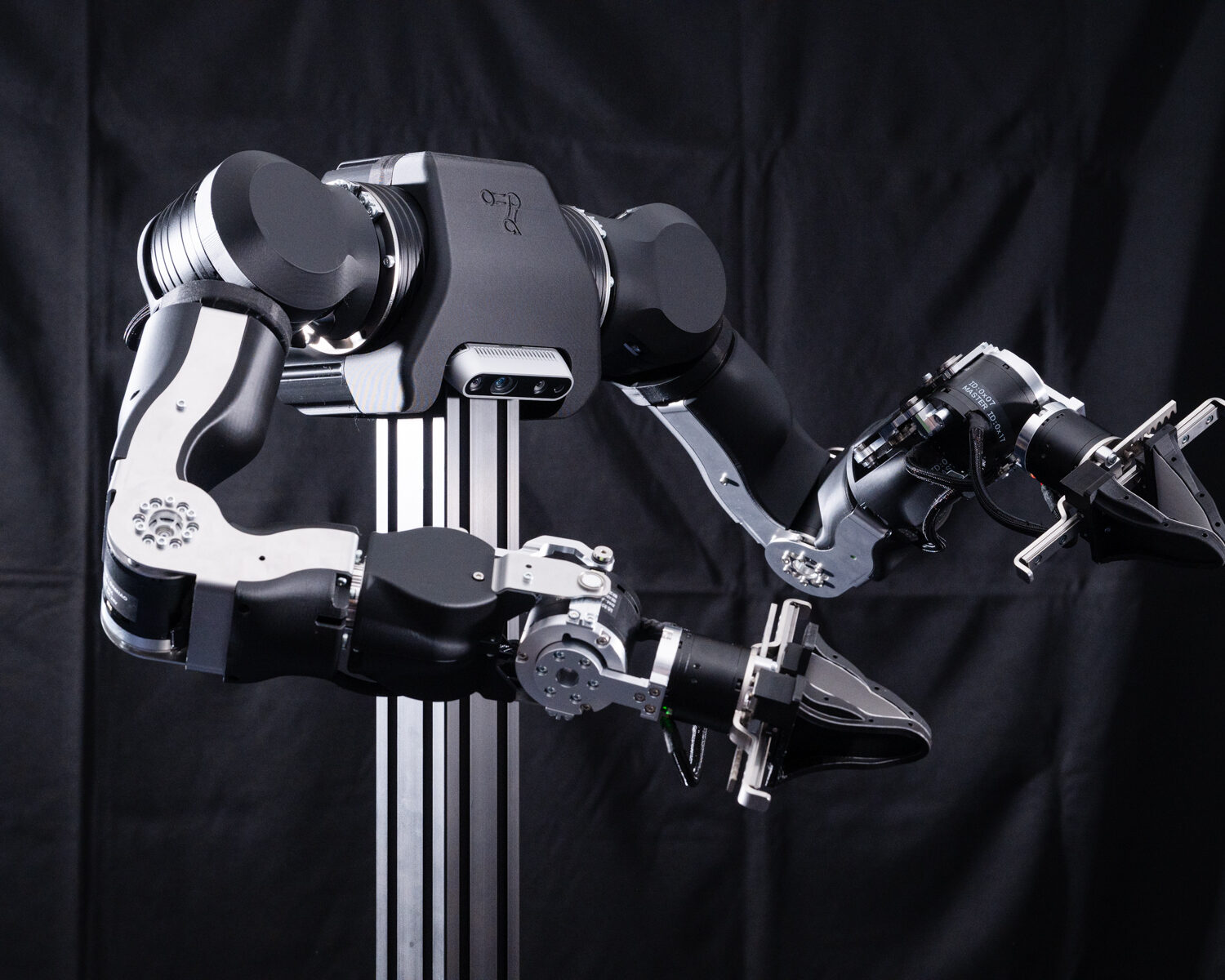
Hardware: OpenArm 2.0 Arm
The arm keeps the human-scale form factor and payload envelope of 1.0 (7DOF, 4.1 kg nominal / 6.0 kg peak, MISUMI-frame base), and refines the parts that matter most for data collection in tight spaces.
Redesigned end-effector. The gripper uses a simpler actuation mechanism to keep the overall envelope compact, making it easier to reach into confined spaces than the 1.0 gripper.
In-hand camera. A camera is integrated inside the gripper case, so in-hand vision is captured directly during grasping. The finger geometry is shaped both for stable grasping and to minimize blind spots in that view.
Replaceable fingers. The finger components are easy to swap, so users can iterate on geometries for specific tasks or objects without redesigning the gripper itself.
If you are interested, please don’t hesitate to email “support@cereboto.com” immediately.
Prices are listed under EXW terms. Bank transfer is the default payment method.
Please contact us if you require online credit card payment.